+91 6002993949
submission@iarconsortium.org
Open Access
ISSN (Print) : 2708-5155
ISSN (Online) : 2708-5163
In recent years, due to environmental changes, the crop yield in the agriculture is widely affected and hence needs technological intervention. The most recent advancement is the expansion in the utilization of tiny, unmanned aerial vehicles (UAVs) normally known as drones for agrobusiness. Data gathered through drone forays genuinely necessary information to enact systematic models for horticulture. In supporting accuracy in cultivating, drones can do soil health examininations, screen crop health, help with arranging water system plans, apply manures, collects gauge yield information and gives important information regarding climate change. Data gathered through drone combined with other information sources and scientific arrangements give noteworthyinformation. This paper reviews the application of drones for e-Agriculture.
In the present era, each second the total population increases by about three, that is 2,40,000 individuals per day. By 2025, the worldwide population will reach at least up to 8 billion and 9.6 billion by 2050, as indicated by the Food and Agriculture Organization [1]. The world needs to increase agricultural yield by at least 50 percent by 2050 to take care of an increase in population to nine billion with limited land and water resources. With considerable resources required for practical cropping, the difficulties are huge. Simultaneously, environmental change is now adversely affecting farming creation throughout the globe. Farms must increase cultivation while safeguarding nature, however it is difficult with the present traditional farming practices. Thus, the recent development in traditional farming is the use of UAVs [2] for agricultural application.
UAVs or drones are remote controlled airplane with no human pilot. These have a tremendous potential in agrobusiness in supporting proof-based arrangement and in spatial information assortment. Precise cultivation along with sensor information and imaging can improve yield through mapping spatial fluctuation in the field. Drone called DJI Agras MG-1 was designed for determining the precision variable rate of application of liquid pesticides, fertilizers and herbicides. The images captured with multispectral and hyper-spectral aerial satellite help in determining NDVI maps that differentiate crops from soil and also detect the diseased crops and crop stages. There is a strong relation between data measured using NDVI and crop yield [3]
A healthy crop must contain 3 to 4 percentage of nitrogen content in their ground tissue and the University of Minnesota found the nitrogen content in plant using multispectral images of drone as shown in Fig 1.3. The level at which a plant reflects infrared, red and green light depends on the amount of nitrogen it contains. A plant with too little nitrogen has minor colour variations compared to a plant with sufficient nitrogen and modern sensors can measure those differences [9].
Fig 1.3. Nitrogen content measurement using UAV
This level of information enables early identification of pests and diseases. The precisely mapped and identified issues within a certain area can be addressed with precise applications of fertilizers, pesticides or herbicides. The impact of regulations on large to small UAVs are put forth in some case studies of Hawaii: large UAS used on coffee plantations, Japan and the United States of America: a medium UAV used on vineyards, The Republic of South Africa: a small UAV for vineyards, The Republic of India: a small UAV on a coffee plantation. The rules and regulations are implemented for the UAVs in various republic nations for its legal usage.
The drones are equipped with a range of image data sensors based on the purpose. The main application for this review paper is the use of UAVs for smart agriculture. For this purpose, the UAVs are fitted with infrared cameras that helps in determining the value of Normalized Difference Vegetation Index (NDVI). This technology helps not only in determining the condition of a plant but also used to determine the condition of specific part of a plant. The technologies such as recognition technologies, artificial intelligence and machine learning are implemented in drone and the potential roles of these are illustrated in the table 2.1 [10]
Table 2.1. Potential role with technologies
Technology | Potential role |
Machine learning | Permits the drones to find out about the procedure happening dependent on chronicled information, Allows vital observing arrangement with pre-processed algorithms. |
Recognition technology | To extract the data and interpret images for datum calculation of the crops such as NDVI, CAI, NDTI, crop stress |
Artificial intelligence | Fault identification, fast information preparing, understanding and information examination, predictive examination based on historical data, facilitates the communication between the drones and operation group. |
Thus, with this data, the problem can be encountered and necessary actions can be taken. The drone captures image of the crop field at a certain height and realize soil, crop and irrigation monitoring systems, calculate vegetation indexes, forecast crop yields, detect erosive, dry or extruded plots and track product quality during harvesting [11]
Fig 2.1. Drone image at the height of 10m
The images captured by the drone as shown in the Fig 2.1 are used for the calculation of various data such as NDVI, Green Normalized Difference Vegetation Index (GNDVI), Normalized Difference Red Edge (NDRE) using the reflectance data provided by the multispectral image from camera with a wide range of light intensity levels [12].The early stage in any disease to the crop can be easily determined by stress detection in plants which shows a colour difference in multispectral image as shown in Fig 2.2 [13].
Fig 2.2. Detecting fungal disease in a crop field
Further the UAVs can be equipped with spraying system to spray fertilizers to the crops. The modern drones are fitted with a tank using which a fertilizer can be sprayed. With the application of soil colour coverage, the soil condition can be assessed. Thus, this helps in determining the moisture content and waterflow precisely. The NDVI value obtained also tells the right time for harvesting. All these data are stored and managed for future reference. But the major challenge faced in this is the data storage and management. A dataset including the accuracy and precision information generates up to 140GB of data per square kilometre with GSD of 1 centimetre as determined by the FAO [14]. As GSD increases the data storage capacity needed also increases and it is shown graphically in Fig 2.3.
Fig 2.3. Estimated total data volume for geospatial products based on GSD
The utilization of drones for farming insurance is increasing. Pictures from the drones are the most recent tool in surveying crop harms and helps in claiming the insurance [15].The Landsat 8 OLI images captured by drone helps in identifying the indices such as Normalized difference tillage index (NDTI), Simple tillage index (STI), RATIO, Normalized difference index [16].The Landsat satellite and EO-1 hyperion imaging spectrometer data was used to determine the NDTI and Cellulose absorption index (CAI). These models were seen as simple to create, cost and time successful, and delivered sensibly exact culturing order results.revealed that accomplishing adequate advancement in residue mapping, in which estimating and evaluating spatial inconstancy in crop is controlled by a few variables, for example, residue type, residue dampness, soil dampness, soil types, and season, soil life forms, and pH which impact residue disintegration rate and time of residue [17].Agile optimization algorithms represent a new pattern in the design of optimization algorithms, which follows the following principles: (i) extremely fast execution, thus providing real-time decision support; (ii) easy to implement and run using parallelization techniques; (iii) flexibility to deal with different problems and variants; (iv) parameter-less, hence avoiding complex and time-costly fine-tuning processes; and (v) specifically designed to run iteratively every few seconds or minutes–hence allowing for high-frequency re-improvement as new streams of data arrive in a dynamic and connected environment. The necessities with respect to exactness, goals and layers of information utilized should completely mirror the prerequisites of a particular use and in this manner ought to be moved toward a marketable basis of UAV for smart agriculture.
Drones are classified into various types based on the design of copter configurations. In present market, there are six types of drones available that includes Bi-copter, Co-axis bi-copter, Tri-copter, Quad-copter, Hexa-copter, and Octo-copter [10].The configurations with its design complexity are shown in Table 2.2.
Table 2.2. Drone types and its configuration
Drone copter type | Configuration | Design complexity | Cost |
Bi-copter | I-2 or I, -2 | More | Less |
Co-axial bi-copter | O-2 or O | More | Less |
Tri-copter | Y-3 or Y, IY-3 or IY | Intermediate | Less |
Quad-copter | X, I, H | Less | Medium |
Hexa-copter | Y, IY, X, I-6 | Intermediate | High |
Octa-copter | I8, V8, X8 | More | Very high |
The important factor to be considered in designing of drone is its dynamic factor. The other factors to be considered are hovering, rolling, pitching, yawing. These are the primary elements that are to be controlled for drone stability and directional control. The table 2.3 given below illustrates the dynamics of drone for a quad copter.
Table 2.3. Drone dynamics (Quad-copter)
In the above tabulation, the rotor speeds are differentiated where lesser speed is denoted with small arrow mark and vice versa. The velocity of drone can be controlled by nonlinearity inherent in dynamics [18] where angular rate and attitude are controlled by inner loop controller. This works better even in the case of wind and turbulence. A high gain observer can be intended to assess the position and speed of the drone. At that point, a nested saturation control is planned dependent on the high-gain observer to make the drone track the direction of the deck and keep a fixed hurling separation over the moving deck. A hybrid control is applied to make the attitude of the drone to accomplish the best coordination with the attitude of the deck while fulfilling the functional controllability requirement of the drone. The hybrid control is likewise accessible to keep away from the winding phenomenon [19].
The drone (quadcopter) could be controlled by adaptive control system where the target is set by GPS navigation system and these data are given to the controller. The microcontroller controls the rotor by means of PWM controller [20] The basic layout of control system is given in below Fig 2.4.
Fig 2.4. Control system of drone
Recognition technologies:
Recognition technologies (RT), are referred as the tracking or capture based developing procedures used to screen the physical identification of the things in their unique structure and contrast when resulting changes occur with the things. This permits the interpretation effectively and helps in recognizing the cause for it. Recognition technologies include picture recognition, face recognition, voice recognition and signal recognition. Need for such methods are extremely high in the advanced areas, particularly in the mechanical, clinical, agricultural, safety and producing segments [20].Drones have penetrated into the agricultural industry, and to improve its performance, it is required to choose the appropriate recognition technologies. Gesture and image recognition enabled drones are used for monitoring the crops. From the image, authorized persons can analyse the data and know the status of the crops. This will allow to compile substantial possible interpretations of the monitored images (visual and thermal images) by the farmers. The drones become more intelligent when they are equipped with recognition technologies.
Artificial intelligence:
Artificial Intelligence shortly known as AI works mostly dependent on the computer simulated knowledge requiring extremely less help from the human workforce. The capacity of AI would be like the human brain. The AI is competent in doing processing models, forecast, design recognizable proof, learning capacities. Artificial intelligence fills in as a potential specialist organization in numerous fields, for example, building, medication, transport, modern, financial aspects, farming, and so on. The essential purpose for the expanded applications is the profoundly proficient ability in taking care of the issues [21]. Ordinary and most basic AI applications incorporate the information investigation, information handling, mechanical technology, drones, and so forth. Computer based intelligence could empower the knowledge in the drones utilized for crop observing. Drones empowered with AI examination stage could be useful in recognizing the faults in the agriculture field and crops. Drones with AI will enable quick processing and increases the quality of review. It encourages the communication between the drones itself and the individual who regulates activity and maintenance. Artificial intelligence will assist the drones by assisting the activity and maintenance team for possible fault event and remedies dependent on the pre-observed information and make the work substantially clearer for the mankind.
Machine learning:
Machine learning is in any case known as a significant, profound learning strategy. It is for the most part spoken to utilizing the numerical calculations that help in improving the learning procedure with a wide scope of practical experiences. Machine learning is of three types: one is unsupervised learning which means being able to discover various examples. The subsequent one is supervised learning in which the learning and characterization are done dependent on the past calculations, and third is reinforcement learning where the data is collected based on strategic monitoring of crops and field. Utilizing machine learning, the drones can be made insightful and self-sufficient by prearranging the drone with the calculation and scientific tools [21]
Satellite based rice monitoring (SRM) was initiated earlier integrated with remote sensing, crop modelling and ICT tools to generate and provide accurate information on crop condition. Remote Sensing-Based Information and Insurance for Crops in Emerging (RIICE) technology provides accurate timing for harvesting and the condition of rice plant. In India the SRM based cultivation have been initiated where the Fig 3.1 shows the usage of RIICE in Southern part of India where the red colour indication shows the RIICE operated area.
Fig 3.1. RIICE and SRM based cultivation in India
This coordinated framework consolidating remote detecting, crop demonstrating, web geographic data framework (GIS), unmanned flying vehicles (UAV) and Amazon Web Services (AWS) has produced promising outcomes in all nations. With more noteworthy than 85 percent precision, more than 24.5 million hectares of rice have been checked in 2016, a huge increment of zone inclusion of 1.6 million ha when the activity began in 2012 [22]. The satellite-based rice modelling system acquires information with three software modules, namely MAPscape-Rice [23] Rice Yield Estimation System (Rice-YES) [24], and ORYZA Crop Growth Model [25]. MAPscape-Rice processes Synthetic Aperture Radar raw data into terrain – geocoded images as shown in Fig 5. Rice-YES coordinates remote sensing data from MAPScape-Rice together with climate, soil, and agronomic management information to simulate rice yield utilizing ORYZA crop growth model and together with MAPScape-Rice the yield re-enactment results are changed over into a map structure.
For the pesticide spraying, the technologies accelerometer, gyroscope, WAN along with spraying system are used and along with the technology of DJI phantom, used for crop monitoring and mapping. Multispectral camera helps in detection of condition of crops and determining crop index values [26].The datum obtained from phantom are processed using Pix4d software thus obtaining the orthomosaic image [11].
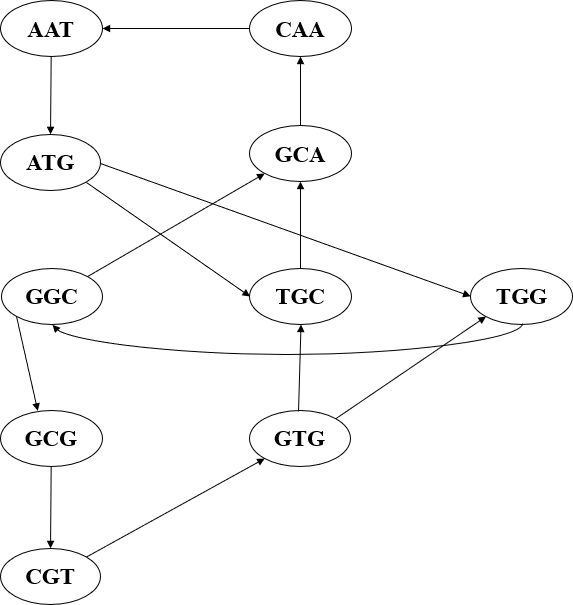
Fig 3.2. MAPscape-Rice processing of SAR raw data
Connected Agriculture:
The vision for SAP connected agriculture utilizing the Leonardo drone based IoT platform is to help development processes in agri-business. This incorporates empowering insight creation and steady advancement of procedures and practices by utilizing smart algorithms. The significant design characteristic of IoT platform is that it uses HANA cloud that allows speed analytics of captured data. Data received by means of drones alone won't give us the total image of the environment and should be utilized related to GIS information, climate information, in-field IoT information, farm machinery information, agriculture commodity value information, fertilizer commodity value information and other agro-economic sources to give us the best choice device. Connected Agriculture utilizing the Leonardo IoT stage endeavours to do this by empowering coordinated effort through normalization and open interfaces utilizing Leonardo Foundation Technical Services [27]. The Sap cloud platform IoT services are not only used to connect remote devices but also used to send and receive commands such as switching on and off of irrigation system based on drone data.
Drones in agriculture can be equipped with aerial camera platform, attached with autopilot technique that works with GPS. The sensors needed to collect relevant data are also attached to the drone. The multispectral sensor gives data on the plant growth, coverage and others including soil moisture content, plant health, stress level of plant. These data measured on various time periods of crops such as soil and field analysis before cropping, planting, crop spraying, crop monitoring, irrigation, health assessment. Autonomous multirotor drone utilizes inventive electronics and basic wellbeing check with numerous shields. It has a long range with high endurance and a high payload limit. There are configurable multi payloads; multispectral, visual and thermal cameras. It is reasonable for numerous applications, for example, natural life protection, ranger service, agriculture, framework examination.
In order to bring a development in smart agriculture, TCS designed a drone for monitoring crop health which is battery as shown in Fig 3.3. The specifications of the drone is given in Table 3.1.
Table 3.1. Specifications of TCS designed drone
| Type | Quad – rotor |
| Power | Battery powered electric motor |
| Dimension | 2 x 2 x 1.5 (length x width x height) in feet |
| Weight | 4.5kg |
| Payload | Camera for monitoring crop health |
| Safety features |
|
Fig 3.3. TCS Quad-rotor drone
The datum collected by the drones is used for earlier detection of irrigation, nutrient stress and pest infestation with the help of cloud-based data analytics. The drones capture multispectral imagery of the crop land and crop health analysis is done using crop indices shown in Fig 3.4. Advanced algorithms have been developed for species identification, population estimation and localization. These algorithms help in classifying areas based on the crop health referred to Fig 3.5.
Disease and pest incidence were determined based on the plant stress index level. From the multispectral images, the disease incidence was found to be in the places that showed higher level of plant stress [28]. The drones also find the acreage of the crops so that the harvesting can be planned accordingly.
In 1983, the research for remote control aerial spraying system was started and Yamaha focused on a craft that uses counter rotating rotors operated by 292cc two stroke liquid cooled engine. Alongside R-50 was developed with main and tail rotor format operated with 98cc two-cylinder two stroke liquid cooled engine. Various sensors were tested and laser sensor was used to control the UAV altitudes using Yamaha Operator Support System (YOSS). Further research lead to the finding of Yamaha Attitude Control System (YACS) in which the information obtained with three fibre-optic gyros and accelerometer helped to control all the axes of UAV automatically. The R-50 was capable of mounting spray equipment, tank for fertilizers, airborne spraying of paddies that helped in reducing the labour cost and time. The fertilizer spraying of R-50 is shown in Fig 4.1.
Fig 4.1. R-50 in spraying fertilizers on target area
Later they introduced RMAX, RMAX Type II and Type II G followed by FAZER R in 2016. The FAZER and RMAX are employed in Japan’s agriculture industry in which they are used to spray over a total area of 1.05 million hectares per year [29]
The UAVs are capable of performing various operations as follows [30]
Soil and field analysis: In this case, the drones produce precise 3D maps for soil analysis. Earlier analysis can be used for seed planting and later analysis is used for measuring moisture for irrigation and nitrogen level management.
Planting: The drones are also used for crop seeding. These frameworks shoot units with seeds and plant supplements into the soil, giving the plant all the supplements important to support life.
Spraying: Distance measuring equipment—ultrasonic echoing and lasers, such as LiDAR, empowers drone to adjust altitude as the geology and topography fluctuate, and in this way maintain a strategic distance from crashes. Consequently, drones can examine the ground and spray the right measure of chemicals, regulating good ways starting from the earliest stage splashing progressively for even inclusion which results in less wastage of chemicals. Also, less spraying leads to lower penetration of chemicals into the groundwater level.
Crop monitoring: Time-arrangement animations can show the exact improvement of a crop and uncover production inefficiencies, empowering better harvest management.
Irrigation: Drones with hyperspectral, multispectral, or thermal sensors can recognize which parts of a field are dry or needs upgrades. Also, when the crop is developing, drones permit the computation of the vegetation index, which portrays the relative density and health of the plant, and show the thermal signature, the measure of vitality or warmth the crop transmits.
Health assessment: It is essential to evaluate crop health and spot bacterial or contagious diseases on crops. By scanning a crop utilizing both visible and near infrared light, drones conveyed gadgets can distinguish which plants reflect various measures of green light and NIR light. This data can deliver multispectral pictures that track changes in plants and demonstrate their health. A fast response can spare a whole plantation. Likewise, when sickness is found, drones can apply and monitor remedies all the more accurately. These two prospects increase a plant's capacity to overcome diseases. Furthermore, on account of crop failure, the drone will have the option to report misfortunes productively for protection claims.
There are various tools used to acquire datum such as creating maps, producing 3D images, generating datasets, data transfer, drone routing and control. The tools used and its descriptions are given in the Table 4.1.
Table 4.1. Tools used to acquire datum
TOOL | DESCRIPTION |
QGIS | Desktop GIS software to visualize, create, edit, manage and analyse spatial data, besides creating maps |
Google Earth Pro | Desktop software to visualize spatial data, satellite images and maps, produce 3D images and videos for presentations and reports. |
Google Earth Engine | Online platform for the visualization of geospatial data and large-scale scientific analysis of large datasets. Contains historical series of satellite images. |
Real Flight | Drone flights simulator for the learning and practice of flight manoeuvres with multiple aircraft models, useful to improve technicians’ skills for drone flights. |
Mission planner | Open source software to direct the RPA ground control station (drones): schedules flight missions, monitors the state of the aircraft in operation, and generates telemetry records. |
Open Data Kit | Free open source toolset for mobile data collection: develops data capture forms, collects data from mobile devices and manages them on a server. |
PostGIS | Open source software for object-relational database management, with an extension – PostGIS – for spatial databases. |
Geoserver | Open source software to share geospatial data from different sources as geoprocessing services, using open geographic information standards such as Web Map Service (WMS), Web Feature Service (WFS), Web Coverage Service (WCS), among others. |
The data created by drones can have numerous applications and can be utilized for various purposes, depending upon the necessities of every application. This would incorporate forest monitoring, territorial arranging, checking of forest fires, populace development elements, attack of their regions and observing of harvests, among others. Notwithstanding acquiring pictures of extremely high spatial goals, the high superposition of pictures got with the drones permits the derivation height data, from a computerized stereoscopy. With this data on the height and the ground cover, the altitude and the volume of the vegetation can be determined and, together with the land focuses, the vital topographic data can be assembled. Through the multitemporal examination of these outcomes, extremely inconspicuous inclusion changes, for example, the extraction of a specific tree, can be recognized in a computerized way. A drone model used for a project is “Fixed-wing drone model E384”.
Table 4.2. Characteristics of E384 model
The data obtained from sensors in drone provides a gradual measure of farmer’s decision making with respect to the involvement of drones, which gives more detailed insight into farmer’s adoption processes than the more common approach.
For a large crop area like hundreds of hectares, the usage of single drone would be difficult as it cannot monitor the whole field. Thus, the swarms of UAVs can be used based on master-slave configuration. The master drone has the communication control with the operator at the base station and all other drones can be communicated with the master drone and acts as a slave. Each drone in the swarm can straight forwardly communicate with its peers at a similar degree of the hierarchy and with its head drone(s). Master drones are capable of getting command and speak with the ground-based server, sharing the information gathered and pre-processed by the swarm [31]
Basic autonomy originates from proprioceptive sensors. Advanced autonomy calls for situational awareness, information about the surroundings of the airplane from exteroceptive sensors: sensor combination coordinates data from numerous sensors [2] and a small block of basic autonomy is given in Fig 4.3.
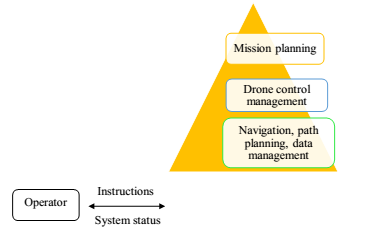
Fig 4.3. Basic Autonomous control
IoT WITH UAV IN AGRICULTURE:
In the developed nations, the Internet of things (IoT) has been utilized to the benefit of farmers, increased production and decrease working expenses to improve work effectiveness. IoT is viewed as the most encouraging innovation for driving agribusiness, for example cultivating, fishing and the poultry business.
UAV-WSN BASED SYSTEM:
In this Zigbee and Lora wireless modules were installed with about 30 wireless nodes for communication as shown in Fig 5.1. ZigBee expands upon the IEEE 802.15.4 standard which characterizes the physical and MAC layers for ease, low rate individual territory systems. It characterizes the system layer determinations, taking care of star and distributed system topologies, and gives a structure to application programming in the application layer (Wireless Sensor Networks). The motion of the sensor can be detected and controlled with various sensors and controllers with the aid of electrical, mechanical components and software [32].
The WSN network is a mix of sensors embedded processing, appropriated data, remote data, network security, smart control and a progression of trend setting innovations of the Internet of things innovation stage. Based on these, the UAV-WSN forms a complex system which obtains data using serial port communication with UAV. The WSN nodes combine various Zigbee nodes that are connected to sensors and are communicated with UAV. A single Zigbee node covers radius of 200-500m, thus a swarm of Zigbee nodes with UAV can cover thousands of hectares. Each sensor module consists of up to ten sensors for soil and environment information, for example soil temperature, soil humidity, soil fertilizer, sunlight intensity, CO2, soil PH value, rain intensity, wind intensity. The data acquired will then be transmitted from the coordinator inside the WSN to the UAV side for data collection. The collaboration of Ground WSNs, UAVs, GSM networks and ground stations helps in forming UAV-WSN system [33] is shown in Fig 5.3.
The performance of the UAV is affected by various factors, which will be determined based on the performance to cost ratio.
CHALLENGES:
One of the difficulties is the balance between the UAV cost and the performance. High execution of the UAV with long flight time, strength, will be costly and keep farmers from embracing the application as they are impervious to any new expenses. The subsequent test is that farmers need time to acknowledge new innovation and to be persuaded that benefits from this plan are ensured
These UAV-based methods will improve farm production efficiency with striking enhancements for huge crop information contrasted with ordinary surveillance. In any case, the UAV-based observation, despite everything, needs to address difficulties, for example, security in poor natural and climate conditions. The UAV-based WSN is a promising innovation and another option that will accomplish minimal effort, wide-extending communication, real time, reliable information gathering at the point when the base station is not accessible.
The authors declare that they have no conflict of interest
No funding sources
The study was approved by the PSG college of Technology, Coimbatore, India
https://www.iso.org/news/Ref2183.htm the future of farming
“Unmanned aerial vehicle", En.wikipedia.org. [Online]. Available: https://en.wikipedia.org/wiki/Unmanned_aerial_vehicle.
Huang, J., Wang, X., Li, X., Tian, H., & Pan, Z. (2013). Remotely sensed rice yield prediction using multi-temporal NDVI data derived from NOAA's-AVHRR. PloS one, 8(8), e70816.
Insurers now employing drones to check claims by farmers. The Hindu-Business Line,14 March [online] [Cited 22 September 2017]. http://www.thehindubusinessline.com/economy/agribusiness/insurers-now-using-deploy-drones-to-check-claims-by-farmers/article9583909.ece
Pix4D. (2017). Aerial crop analysis [online]. [Cited 22 August 2017]. https://pix4d.com/product/pix4dag
Sentera. (2017). Agvault unlocks your data [online]. [Cited 22 August 2017]. https://sentera.com/agvaultsoftware/
https://geo-matching.com/sensefly
https://www.precisionhawk.com/blog/media/topic/automated-weed-identification-with-drones
Drones can help optimize nitrogen fertilization in potato farming, Frits van Evert, Wageningen University and Research, https://www.potatopro.com/news/2017/drones-can-help-optimize-nitrogen-fertilization-potato-farming.
Kumar, N. M., Sudhakar, K., Samykano, M., & Jayaseelan, V. (2018). On the technologies empowering drones for intelligent monitoring of solar photovoltaic power plants. Procedia computer science, 133, 585-593.
Hovhannisyan, T., Efendyan, P., & Vardanyan, M. (2018). Creation of a digital model of fields with application of DJI phantom 3 drone and the opportunities of its utilization in agriculture. Annals of agrarian science, 16(2), 177-180.
Raeva, P. L., Šedina, J., & Dlesk, A. (2019). Monitoring of crop fields using multispectral and thermal imagery from UAV. European Journal of Remote Sensing, 52(sup1), 192-201. DOI: 10.1080/22797254.2018.1527661
USE OF DRONES IN AGRICULTURE Advanced crop scouting in less time https://wingtra.com/drone-mapping-applications/use-of-drones-in-agriculture/
Food and Agriculture Organization of the United Nations agricultural land area for (2014). https://www.google.com/search?q=Food+and+Agriculture+Organization+of+the+United+Nations+agricultural+land+area+for+2014
Wadke, R. (2017). Insurers now employing drones to check claims by farmers. The Hindu-Business Line, 14 March [online] [Cited 22 September 2017]. http://www.thehindubusinessline.com/economy/agribusiness/insurers-now-using-deploy-drones-to-check-claims-by-farmers/article9583909.ece
Raoufat, M. H., Dehghani, M., Abdolabbas, J., Kazemeini, S. A., & Nazemossadat, M. J. (2020). Feasibility of satellite and drone images for monitoring soil residue cover. Journal of the Saudi Society of Agricultural Sciences, 19(1), 56-64.
Sonmez, N.K., & Slater, B. (2016). Measuring Intensity of Tillage and Plant Residue Cover Using Remote Sensing, European Journal of Remote Sensing, 49 (1), 121-135, DOI: 10.5721/EuJRS20164907
Lee, D., & Shim, D. H. (2018). Development of mini-drones and feedback linearization based velocity control for outdoor autonomous swarming flights. IFAC-PapersOnLine, 51(22), 178-183.
Li, S., Durdevic, P., & Yang, Z. (2018). Hovering Control for Automatic Landing Operation of An Inspection Drone to A Mobile Platform. Ifac-papersonline, 51(8), 245-250.
Thu, K. M., & Gavrilov, A. I. (2017). Designing and modeling of quadcopter control system using L1 adaptive control. Procedia Computer Science, 103, 528-535.
Hamet, P., & Tremblay, J. (2017). “Artificial intelligence in medicine.” Metabolism Clinical and Experimental 69, 36-40.
http://www.riice.org/what-riice-achieved/what-riice-achieved/
Nelson, A., Setiyono, T., Rala, A. B., Quicho, E. D., Raviz, J. V., Abonete, P. J., ... & Ninh, N. H. (2014). Towards an operational SAR-based rice monitoring system in Asia: Examples from 13 demonstration sites across Asia in the RIICE project. Remote Sensing, 6(11), 10773-10812.
Setiyono, T.D., Quicho, E.D., & Romuga, G.C. (2017). Rice Yield Estimation System (Rice-YES) User Manual. International Rice Research Institute. Los Baños, Philippines.
Li, T., Angeles, O., Marcaida III, M., Manalo, E., Manalili, M. P., Radanielson, A., & Mohanty, S. (2017). From ORYZA2000 to ORYZA (v3): An improved simulation model for rice in drought and nitrogen deficient environments. Agric. For. Meteorol. 237, 246–256.
Talaviya, T., Shah, D., Patel, N., Yagnik, H., & Shah, M. (2020). Implementation of artificial intelligence in agriculture for optimisation of irrigation and application of pesticides and herbicides. Artificial Intelligence in Agriculture. https://doi.org/10.1016/j.aiia.2020.04.002
https://open.sap.com/files/b5f14661-a9dc-4c86-b430-067f843d8a48
https://www.itu.int/en/ITU-D/Regional-Presence/AsiaPacific/SiteAssets/Pages/E-agriculture-Solutions-Forum 2018/TCS%20Digital%20Farming%20Initiatives _Shankar%20Tagad_ESF%202018_v0.2.pdf
Platform for Agricultural Technology Infield Robotics & Sensors, Data & Software and Precision Farming Platform for Agricultural Technology Infield Robotics & Sensors, Data & Software and Precision Farming http://agtecher.com/product/yamaha-helicopters/
https://www.technologyreview.com/2016/07/20/158748/six-ways-drones-are-revolutionizing-agriculture/
Tahir, A., Böling, J., Haghbayan, M. H., Toivonen, H. T., & Plosila, J. (2019). Swarms of unmanned aerial vehicles—a survey. Journal of Industrial Information Integration, 16, 100106.
https://mrsdprojects.ri.cmu.edu/2015teama/systems-engineering/
Popescu, D., Stoican, F., Stamatescu, G., Chenaru, O., & Ichim, L. (2019). A survey of collaborative UAV–WSN systems for efficient monitoring. Sensors, 19(21), 4690.
