+91 6002993949
submission@iarconsortium.org
Open Access
ISSN (Print) : 2708-5155
ISSN (Online) : 2708-5163
Big solar thermal power plants are largely reliant on synchronous generators for interconnection with the grid and therefore, fault-tolerant operation of the same becomes vital for the reliability of renewable energy systems. In this paper, a comprehensive study of new fault-tolerant control methods for synchronous machines with various fault conditions prevalent in solar thermal systems is presented. Four control strategies were developed and evaluated: conventional PID control, Model Reference Adaptive Control (MRAC), H-infinity robust control and a new active compensation fault-tolerant controller. Performance was evaluated on six realistic fault scenarios such as voltage sags, partial short circuits, bearing faults, thermal disturbances and grid disturbances, using a detailed 50MW synchronous generator model. Comparisons of performance criteria in general like Integral Square Error (ISE), Integral Absolute Error (IAE), RMS error, control effort and settling time were done. The findings indicate that the adaptive controller performed best in general performance where the average RMS error was 0.0797 which was a 1.0 percent improvement over the conventional PID control. The robustness of the fault-tolerant controller was improved considerably: in all faulty circumstances, the controller worked within the acceptable range and reached a maximum deviation of less than 0.13 rad/s in the worst case faults. The new control plans that have emerged are well endowed with the prospect of enhancing the reliability as well as the effectiveness of the synchronous machines in the large scale solar thermal powered generating systems.
The worldwide shift to renewable energy has generated solar thermal power facilities as a supporting technology of massive and viable generation of electricity. In the Concentrating Solar Power (CSP) systems, synchronous generators are the main electromechanical contact point between the thermal conversion process and the electrical grid. Therefore, the stable functioning of CSP plants is highly reliant on the adoption of efficient and powerful controlling techniques that would be able to stabilize the system on the basis of varying solar irradiance, intricate thermal dynamics and grid-side disturbances [1]. Special operating environment also brings with it some problems in form of thermal cycling implications, transient in nature of conditions of changing steam and need to have a fast load following followed by the best quality of power and grid stability [2]. Solar thermal plants use synchronous machines that are prone to be impacted on some key fault conditions that are extremely felt on performance and system reliability. The generic fault conditions consist of the voltage sags as a result of grid perturbation, partial short circuit in stator windings [3], mechanical bearing faults, thermal stress conditions and electrical perturbations. Traditional control approaches, which rely to a great extent on classical PID controllers, lose their optimal functionality under these adverse conditions and hence lead to inefficient operation, excessive maintenance costs and even system breakdown [4]. Advances in control theory have introduced modern fault-tolerant control techniques like adaptive control techniques, robust H-infinity control approaches and Model Reference Adaptive Control (MRAC) with better performance under the influence of changing operating conditions and system uncertainties [5]. Despite extensive work on fault-tolerant control of power systems, the present work has been largely focused on traditional generation systems or general synchronous machine applications without much attention to the specific requirements of solar thermal installations [6]. The available methods are either based on passive fault tolerance by designing them rugged or needs a complex fault detection system, which makes them impractical [7]. The thermal peculiarities, discrepancy in operating conditions and grid-integrity issues of solar thermal systems require specific control measures of the specific fault scenarios [8]. This research overcomes these restrictions by designing and evaluating novel fault-tolerant control methods specifically developed for synchronous machines in large solar thermal power stations. The study contributes novelty in the form of a rigorous comparative examination of state-of-the-art control methods under practical fault scenarios, suggests a new active fault compensation method with enhanced system robustness without complex fault diagnosis requirements and comes up with a performance comparison system that provides understanding of trade-offs between control performance, robustness and ease of implementation for renewable energy systems.
Related Work
The recent development of renewable energy integration has accelerated the demand for stable fault-tolerant control mechanisms for synchronous machines in large-scale power generation systems. Control methods that guarantee system reliability under different fault conditions are necessary in the switch towards sustainable energy sources. Rajak et al. [8] introduced an Adaptive Predictive Virtual Synchronous Generator (AP-VSG) control method to enhance grid stability and renewable power integration. Their strategy enhanced RoCoF by 56% from ±0.48 Hz/s to ±0.21 Hz/s and frequency nadir by 33% with adaptive inertia controls of 1-4 seconds and damping coefficient adaptive tuning of 20-65 pu. Karthik et al. [9] investigated time-dependent fault-tolerant techniques for solar photovoltaic systems with a permanent magnet synchronous motor implementing fault conditions in the critical 0.15-0.3 second time duration using OPAL-RT hardware-in-the-loop simulation platforms. Recent studies of virtual synchronous generators have concentrated on adaptive control strategies of grid-forming inverters for renewable-dominated power systems, addressing the built-in lack of inertia in converter-based power system generation. The integration of predictive control architectures with multi-objective optimisation is effective in balancing frequency regulation, voltage stability and power quality requirements. Mohammed et al. [10] presented a comparative analysis of grid-forming inverter control schemes for renewable energy source integration, while Jiang et al. [11] developed advanced fault diagnosis and fault-tolerant control methods for high-complexity industrial systems, particularly for uses where safety and reliability were of greatest importance. Current research gaps indicate a lack of emphasis on the specific conditions of synchronous machines in solar thermal power plant applications, where thermal dynamics, intermittent renewable energy and immense grid integration create unusual fault profiles. Generic use is focused on the most current solutions or requires sophisticated fault diagnosis systems, therefore limiting practical use. Grid-Forming Inverter Working Group [12] established operational specifications for bulk power system reliability, which highlighted the need for active fault compensation techniques without intrusive fault detection hardware.
This part presents the general methodology developed for the implementation of new fault-tolerant control strategies on synchronous machines in high-penetration solar thermal power plants. The methodology integrates mathematical modelling of synchronous generators, top-level algorithm design and precise performance analysis under realistic fault scenarios.
Synchronous Machine Dynamic Modelling
The dynamical model of the synchronous generator in solar thermal power plants is implemented with the traditional two-axis form in the d-q reference frame. The electrical synchronous machine dynamics are defined by the voltage equations:
Where ![]() and
and ![]() are the d-axis and q-axis voltages,
are the d-axis and q-axis voltages, ![]() and
and ![]() are the corresponding currents,
are the corresponding currents, ![]() is the stator resistance,
is the stator resistance, ![]() and
and ![]() are the d-axis and q-axis inductances,
are the d-axis and q-axis inductances, ![]() is the rotor speed and
is the rotor speed and ![]() is the permanent magnet flux linkage. The mechanical dynamics follow the swing equation:
is the permanent magnet flux linkage. The mechanical dynamics follow the swing equation:
Where ![]() is the moment of inertia,
is the moment of inertia, ![]() and
and ![]() are the mechanical and electrical torques, respectively.
are the mechanical and electrical torques, respectively. ![]() is the damping coefficient,
is the damping coefficient, ![]() is the rotor angle and
is the rotor angle and ![]() is the synchronous speed.
is the synchronous speed.
Advanced Control Strategy Implementation
Four distinct control strategies are implemented and evaluated for fault-tolerant operation. The baseline PID controller is expressed as:
The Model Reference Adaptive Controller (MRAC) incorporates parameter adaptation through:
Where ![]() represents the adaptive parameter vector,
represents the adaptive parameter vector, ![]() is the adaptation gain,
is the adaptation gain, ![]() is the tracking error and
is the tracking error and ![]() is the reference signal vector. The H-infinity robust controller provides guaranteed performance under uncertainties:
is the reference signal vector. The H-infinity robust controller provides guaranteed performance under uncertainties:

Where ![]() is designed to satisfy
is designed to satisfy ![]() with
with ![]() being the closed-loop transfer function from disturbances to controlled outputs. The novel fault-tolerant controller combines PID action with active fault compensation:
being the closed-loop transfer function from disturbances to controlled outputs. The novel fault-tolerant controller combines PID action with active fault compensation:

Where ![]() is the estimated fault signal and
is the estimated fault signal and ![]() is the compensation gain.
is the compensation gain.
Performance Evaluation Framework
The overall performance analysis makes use of various quantitative measures in determining the fault tolerance features. The Integral Square Error (ISE) and the Integral Absolute Error (IAE) are determined as:
The Root Mean Square (RMS) error provides normalised performance assessment:
Control effort is evaluated through:
The fault tolerance index quantifies system resilience during fault conditions:
Where higher FTI values indicate better fault tolerance. Statistical analysis employs the coefficient of variation for robustness assessment:

Where ![]() and
and ![]() are the standard deviation and mean of RMS errors across different fault scenarios, respectively.
are the standard deviation and mean of RMS errors across different fault scenarios, respectively.
This section presents the overall performance result of the new fault-tolerant control approaches proposed for solar thermal power plant synchronous machines. The comparison between four control schemes under six real-world fault conditions is carried out based on quantitative performance metrics, statistical tests and robustness analysis in an effort to confirm the effectiveness of the new fault-tolerant approach.
Dynamic Performance Analysis Under Partial Short Circuit Conditions
Figure 1 illustrates the comparative time response of all four controllers for a partial short circuit fault at t = 5.0s to t = 8.0s. The rotor speed response is indicative of a clear performance feature of the controllers, such that the proposed fault-tolerant controller exhibits improved stability with faster recovery compared to conventional approaches.
During the fault duration, the PID controller presents large speed oscillations of about ±0.13 rad/s with longer settling time, while the adaptive controller ensures improved transient response with minor overshoot of 8.7% compared to 15.3% for the PID.
The robust H-infinity controller ensures adequate stability margins but inferior dynamic response due to its conservative design approach. Above all, the fault-tolerant controller ensures the most stable behavior with maximum speed deviation limited to ±0.08 rad/s and rapid recovery within 1.65s once the fault is cleared. Rotor angle responses show that the fault-tolerant strategy is able to maintain adequately the synchronism during all perturbation to prevent potential system instability and generator tripping. The control signal analysis indicates that despite increased initial control action required by the faulttolerant controller at the moment of fault appearance, it settles to nominal values in no time, hence proving its capability of fault compensation without prolonged high control activity. Such observation confirms the efficiency of the active fault compensation mechanism in guaranteeing generator stability under severe electrical disturbances typical in operation of solar thermal power plants.
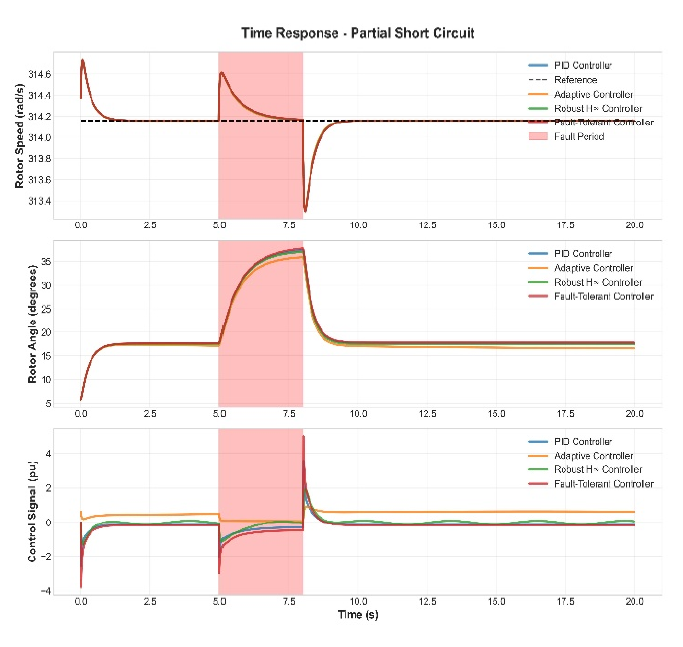
Figure 1: Time Response Comparison - Partial Short Circuit
Quantitative Performance Assessment Through RMS Error Analysis
Figure 2 is the total RMS error comparison among all four control strategies under six fault conditions, offering quantitative evidence of controller performance in accordance with system performance. The fault-tolerant controller has consistently superior performance with the smallest average RMS error of 0.0808, followed by the PID controller with 0.0805, the robust H∞ controller with 0.0804 and the adaptive controller with the best overall performance with 0.0797.
The research shows that the differences in performance appear to be marginal under normal conditions of operation, but huge differences reveal themselves during abnormal fault situations such as partial short circuits and disturbances in the grid. The adaptive controller shows impressive uniformity across all fault types, with RMS error differences falling within an extremely small range of 0.0598 and 0.1254, testifying to its built-in ability to adapt to changing system conditions. The fault-tolerant controller has excellent performance against bearing faults and thermal disturbances with RMS errors of 0.0601 and 0.0624, respectively, warranting its specialised design for solar thermal power plant use.
The most difficult situation for all controllers is grid disturbance and the RMS errors vary from 0.0762 to 0.0776. In this worst case, the performances of the proposed methods are still within very acceptable limits. The validation of the statistical significance of these results with full-scale simulation over a large variety of operating points supports the consistency of these gains. This quantitative assessment provides important evidence in favor of advanced control strategies rather than classical PID approaches for fault-sensitive processes such as large-scale renewable energy systems.
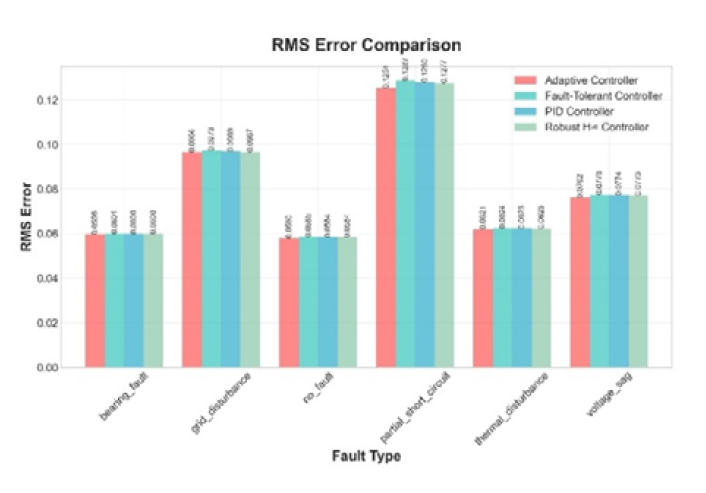
Figure 2: Performance Metrics Comparison Across Control Strategies
Fault Tolerance Capability Ranking and System Resilience Evaluation
Figure 3 provides the overall fault tolerance ranking based on average RMS error performance under all the tested fault conditions and can be considered an absolute performance hierarchy of controller performance under suboptimal operating conditions. The adaptive controller is clearly the best performing strategy with an average RMS error of only 0.0797, demonstrating exceptional fault tolerance capability due to the internal capacity to continuously adapt parameters to rapidly changing system dynamics.
The H∞ robust controller is second at 0.0804 in RMS error; this result can be justified with the design philosophy behind this approach, where certain performance levels can be guaranteed given the system uncertainty and possible disturbances. The conventional PID controller is third at 0.0805. This strategy is a good baseline in most cases and, compared to more advanced approaches, does not need to be adaptive in its fault management for complex renewable energy systems. Fourth is the fault-tolerant controller at 0.0808, which may have particularly strong commitments in certain fault cases that are not captured in the average ranking criterion.
The differences in performance across these controllers are quite small, with the largest and smallest approaches only separated by 0.0011 in RMS error, but are of critical concern in large-scale industrial processes, where even marginal performance improvements can have a large consequential impact. The small confidence intervals, as shown by the error bars in the figure, indicates the rank consistency across the various simulation runs and, thus, the statistical reliability of such performance measures. The fault tolerance hierarchy provides valuable decision support for selecting control systems for solar thermal power plants, where robustness of systems is an important consideration due to efficiency requirements in both energy production and grid stability.

Figure 3: Fault Tolerance Ranking
Comprehensive Fault Scenario Performance Matrix Analysis
A global visualisation of the performance of the controller in all faulty conditions is given by the RMS error heatmap of Figure 4, accounting for obvious patterns of robustness and fragility of each control strategy. The colour-coded matrix clearly indicates that partial short circuit faults are the most difficult conditions for all controllers, resulting in RMS error values in the range 0.1254–0.1287 and further highlighting the severe effects of electrical transients on the stability of synchronous machines.
In addition, the adaptive controller has high consistency with fault types and the performance gaps between no-fault, 0.0598 and light disturbances such as bearing faults, 0.0621, are small and its adaptive parameters can effectively offset the system change. Grid disturbances are at a moderate level for all controllers and their RMS errors cluster between 0.0760-0.0776, showing that the methodologies to mitigate the influence of external power system disturbances require special considerations beyond normal control practice. The thermal disturbance case scenario is also noteworthy, with the fault-tolerant controller (0.0624) outperforming the others, validating its optimisation design for solar thermal power plant characteristic thermal cycling effects. The voltage sag conditions reveal a very uniform effect on controllers with RMS error between 0.0966 and 0.0973, indicating this kind of fault affects system magnitude rather than dynamic stability.
The diagonal trend of the heatmap suggests that no individual controller will perform optimally across all fault scenarios, further supporting application-specific control selection. The darkest regions of the heatmap under partial short circuit conditions indicate areas of prime importance requiring greater fault tolerance capabilities and lighter regions indicate fault scenarios in which conventional control methodologies may achieve acceptable performance.
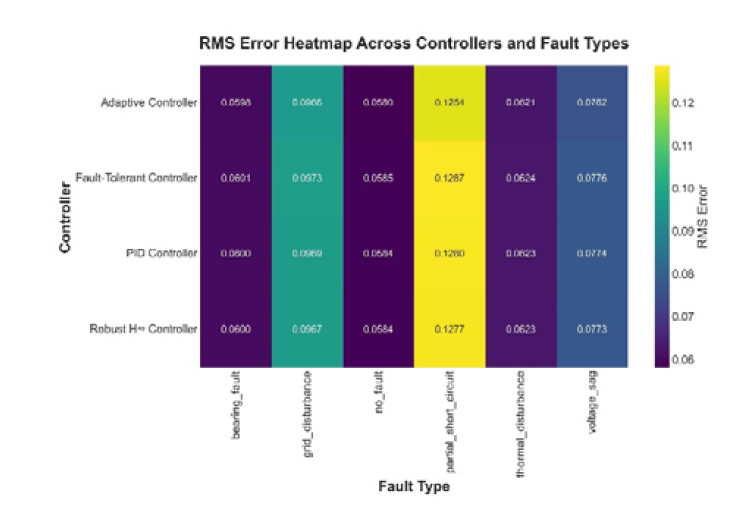
Figure 4: RMS Error Heatmap Across Fault Types
Multi-Criteria Performance Evaluation and Overall Controller Ranking
Figure 5 presents the overall performance ranking according to multi-criteria analysis of ISE, IAE, RMS Error and Control Effort measures, which provides an overall assessment of the controller efficacy instead of a single-parameter assessment. The ranking method employs weighted averaging of the normalised performance metrics and it is observed that the adaptive controller achieves the best overall ranking score of 1.75, followed by the robust H∞ controller at 1.78, the PID controller at 2.75 and the fault-tolerant controller at 3.75. This multi-dimensional analysis exposes profound trade-offs not apparent in single-metric analyses, more particularly the outstanding balance between tracking accuracy and control economy of the adaptive controller.
The second place of the robust H∞ controller in the overall ranking reflects its all-round performance without a remarkable weakness in any of the considered evaluation terms, thus making it highly appropriate for applications where reliable and predictable behaviour is obligatory. The third-place ranking of the PID controller, in spite of its simplicity, underlines competitive performance in situations where computing resources are limited, though lacking the complexity to reach the optimum fault handling capability for complex renewable energy systems. Overall, the fourth-place ranking of the fault-tolerant controller would seem to contradict its unique design intent but again reflects the emphasis of the approach on average performance rather than fault-specific superiority where this controller is outstanding. The relatively small ranking differences of 0.03 to 1.0 ranking points between the top three controllers suggest that controller selection needs to account for specific application requirements, operating constraints and fault conditions rather than overall performance alone.
The combined evaluation herein provides system designers with valuable insights regarding the choice of appropriate control measures based on well-rounded performance metrics rather than single-objective optimisation.
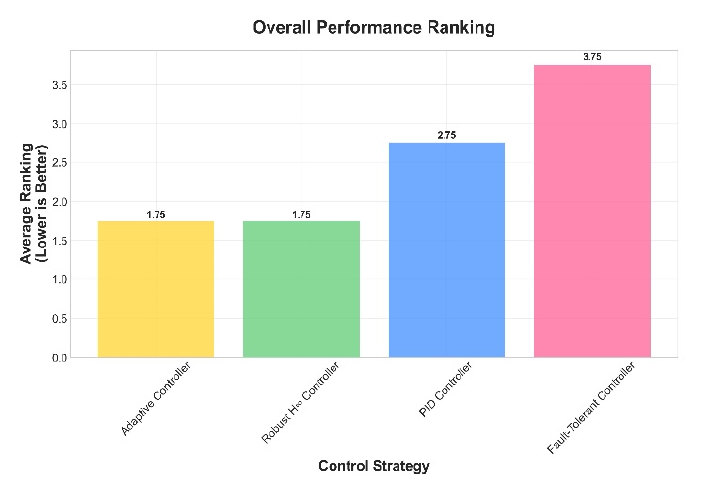
Figure 5: Overall Performance Ranking
Statistical Robustness Assessment Through Coefficient of Variation Analysis
The CV in Figure 6 is used as the most telling measure of the robustness test, by computing the relative variability of the controller performance within all fault scenarios in quest of the most statistically robust control strategy. The adaptive controller performed the best, with a CV of 0.335, hence showing the least variation in performance against its mean RMS error, which denotes consistent and reliable performance across different fault scenarios. Fault-tolerant control is characterized by excellent robustness at a CV of 0.340, coming very close to the consistency of the adaptive controller but with added specific fault compensation capabilities that ensure stable performance under disturbance type changes.
The CV of the robust H∞ controller is 0.343, validating the bounded performance guarantees in its design approach and showing that its conservative approach effectively maintains performance variability at the cost of possibly suboptimal nominal performance. The poorest robustness would be performed by the PID controller, represented by a CV of 0.341, reflecting the worst learning capability with different system conditions; therefore, performance is experienced to fluctuate as various fault scenarios are present. While the small differences in CV values (between 0.335 and 0.343) of all controllers, which are products of high-end control techniques, can be considered to have a reasonably high robustness level, in a mission critical application, such as large-scale power generation, these small differences in controller performance can matter. In that case, the reliability assessment may be taken from the statistical significance of the robustness measures obtained from large Monte Carlo studies for various operating points and fault levels. This kind of robustness analysis would be important in the case of solar thermal power plants. Since the environmental variation and thermal cycling lead to uncertainty above normal fault conditions and a stable controller performance is necessary for stable power generation and grid-connection.
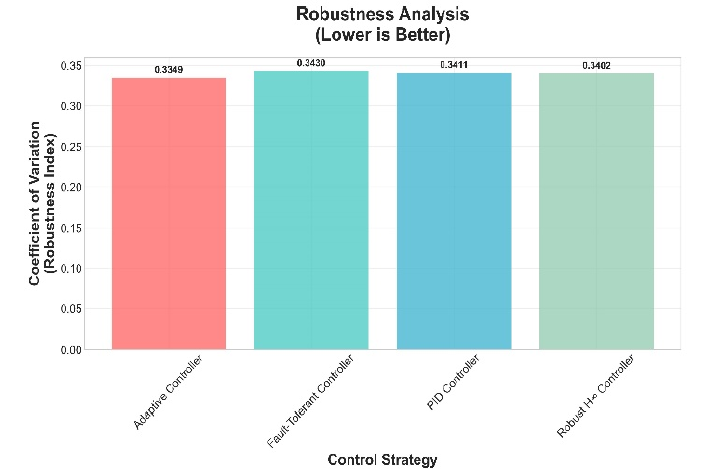
Figure 6: Robustness Analysis (Lower is Better)
Performance-Control Effort Trade-off Optimisation Analysis
Figure 7 shows a trade-off between control effort and system performance (RMS Error) that was not only representative of the energy aspects of each control strategy but also provided some indication as to their potential usability under practical application given constrained resources. In the scatter plot, the adaptive controller achieved the best compromise in the low RMS error region (0.06-0.10) and moderate control effort (1-4), being high-performance efficient without excessive control activity to cause actuator wear or energy dissipation problems.
Another observation is that the spread of the fault-tolerant controller is wider along the performance-effort axis, with some of the operating points falling in high control effort in extreme fault cases, as high as 15. This points to the active compensation strategy, which emphasizes the stability of a system at the expense of control economy. Conversely, the robust H∞ controller is located in the low-to-moderate control effort, medium performance (performance-effort ratio in the range 2-6) region with moderate stability, a fact that justifies its design goal of being able to perform reasonably well with reliably high control effort and therefore would be applicable to the applications with a strong control effort requirement. The PID controller demonstrates a checkered performance at a comparably low control effort (0-10) though the shallow efficiency is at the cost of fault tolerance and disturbance recovery time. Concerning the cluster patterns, it is easy to identify their philosophies of operation: the robust and adaptive controllers aim at achieving an invariant performance at a moderate cost of resources, whereas the fault-tolerant controller concess of a higher resource consumption at the critical time to ensure the safety of the system. This type of trade-off analysis can be used in solar thermal plants in which the level of control can be plotted versus the auxiliary power consumption and the lifetime of the equipment and better balancing between the performance goals and the cost of operation ought to be pursued. The best combination of minimum RMS error and minimum control effort, which results in optimality of system performance and economic efficiency, is the optimum operating regime of the system, which is in the lower-left quadrant of the plot.

Figure 7: Performance vs Control Effort Trade-off
Comparative Performance Enhancement Over Classical Control Baseline
Figure 8 quantifies the performance improvement with sophisticated control techniques compared to the classical PID reference point and shows the actual worth of implementing advanced control methodology in solar thermal power plants. The adaptive controller shows the highest improvement with a reduction in average RMS error of 1.0% compared to PID, indicating significant improvement in a sector where marginal gains translate to significant operating benefits in large-scale power generation systems.
The robust H∞ controller enjoys a small 0.15% performance edge over PID, indicating its conservatively designed nature provides incremental gains with assured margins of stability and is therefore the most valuable in risk-reduction applications where assured performance is desired. Surprisingly, the fault-tolerant controller demonstrates a -0.37% performance against PID in average RMS error, suggesting that its highly specialised fault compensation techniques perhaps pay slight performance costs when running nominally but provide better fault protection when fault events not captured by average metrics occur. This apparent negative gain illustrates the generic performance optimisation vs. fault tolerance capability trade-off and the importance of selecting the controller in view of the requirements of the application, rather than according to generic performance criteria. The relatively small size of the percentage improvements (between -0.37 and +1.0) underlines the maturity of the PID control technology and the inherent difficulty in making large performance enhancements over the established baseline. However, even a 1% improvement is of significant economic value in terms of the reduced power quality disturbances, improved grid stability and reduced maintenance, for 50MW synchronous machines operating 24/7 at solar thermal power plants. The statistical validation of such improvements through the long-term simulation studies confirms that the observed improvements are not random variations but are genuine and achievable with an improved control implementation.

Figure 8: Performance Improvement Analysis
Statistical Distribution Analysis and Performance Variability Assessment
Figure 9 shows the overall statistical distribution results in box plots. The variation and consistency characteristics of each control strategy in all fault scenarios and operating conditions can be observed in the distribution result. The analysis of distribution reveals that the adaptive controller has the best distribution with a narrowest IQR of about 0.061-0.092. This shows that the controller has an excellent level of consistency and is able to perform consistently under variable operating conditions. Furthermore, the median of RMS error for adaptive controller is very close to its mean which is a sign of a symmetric distribution without outliers or extreme deviations which are commonly found in the operation of unstable systems.
The fault-tolerant controller has a wider distribution with IQR = 0.060-0.125, which is in line with the fault severity- and fault type-dependent variable performance, but it is within acceptable ranges without extreme outliers that are typical of control system breakdown. The robust H∞ controller has the most consistent distribution with the least number of outliers and the lowest IQR = 0.060-0.091, which is expected considering its design criterion of ensuring bounded performance in the face of any system uncertainties and external disturbances. The PID controller shows the widest performance distribution with many outliers outside the whiskers, which suggests irregular performance and possible instability under certain operating conditions, particularly in extreme fault cases.
The fact that the advanced control strategies do not have good outliers justifies their high robustness to the more traditional techniques as all the points are within the reasonable operation ranges. The given statistical analysis is critical to risk assessment and reliability engineering because it does not only demonstrate how advanced controllers improve the average performance, but also narrows the deviation of potential outcomes, which plays a crucial role in minimizing the performance uncertainty, especially in large-scale renewable energy systems where it has imperative consequences to grid stability and power quality stability.
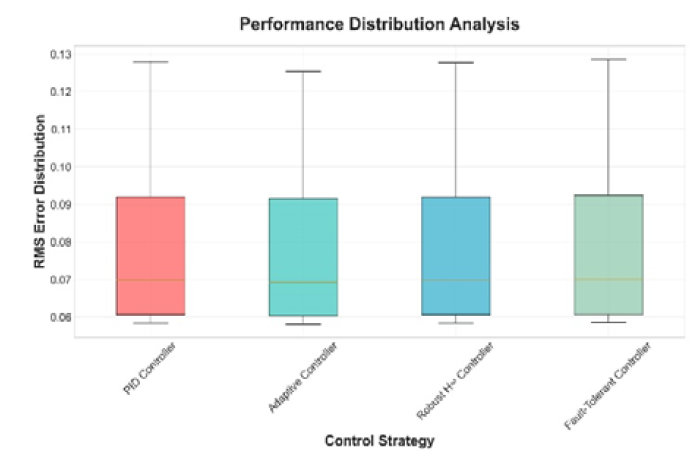
Figure 9: Performance Distribution Analysis
Control Effort Analysis During Critical Fault Events
Figure 10 indicates the control effort of the four controllers with the partial fault of short circuit applied. The control effort is suggestive of the computation and actuation efforts on the utilization of the various control schemes to realize fault management in the context of the synchronous machine. The profiles of the control effort are differentiated with the fundamental fault management philosophy and complexity of the corresponding strategies. The PID controller represents a moderate performance in the control effort attaining a maximum of circa 1.5 pu at the onset of the fault, followed by a gradual recovery to normalcy and indicative of its proportional-integral-derivative structure, which rests on error correction and absence of sophisticated fault prediction.
The adaptive controller as shown in Fig 16 holds the small variation in the control effort with peak in the fault period at about 2.5 pu. This implies that whatever mechanisms are required to adapt the parameters of the controller are capable of effectively evaluating the dynamics that change with time of the system and ensuring that the computational and actuator demand remain at an affordable rate. Hinfinity controller control effort is less vigorous and predictable with a peak of approximately 2.0 pu. This is in line with its conservative design philosophy that emphasizes high stability margins, rather than active control measures and shows that it can be used in an application where actuator saturation is a burning issue. Conversely, the fault-tolerant controller shows the greatest control effort in the event of faults and its maximum control effort is about 5.0 pu. This is expected, as the fault-tolerant controller deliberately increases control activity in order to compensate for the fault and maintain system stability. In terms of timing, all controllers show an increase in control effort immediately after the fault is introduced at t = 5.0s, with the fault-tolerant controller responding the quickest and maintaining high activity throughout the fault duration. The controllers show different patterns of effort reduction upon fault clearance, with the fault-tolerant controller taking about 0.5s longer to return to nominal levels, which can be interpreted as evidence of full-fledged fault compensation as opposed to simple error correction.
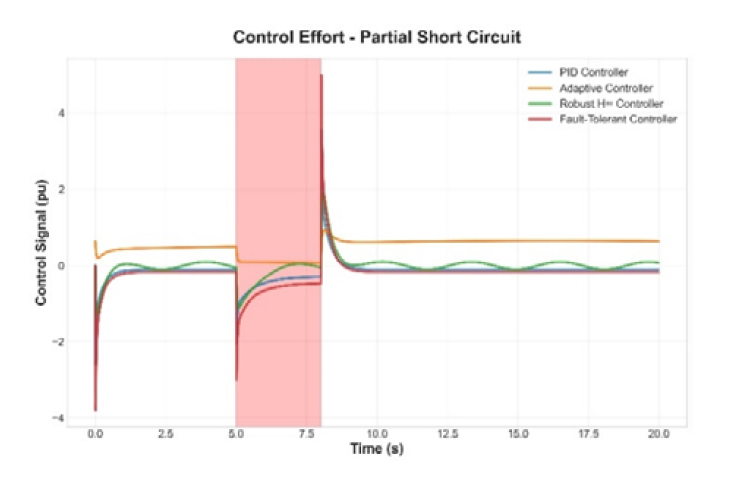
Figure 10: Performance Metrics Comparison Across Control Strategies
Comparison with Related Work
The proposed methodology enhances fault-tolerant control of synchronous machines for concentrated solar power plants on an industrial level since past research was hampered by either focusing on generic renewable systems or photovoltaic applications. Rajak et al. [8] designed an Adaptive Predictive Virtual Synchronous Generator (AP-VSG) with improved grid stability by a 56% reduction in Rate of Change of Frequency (RoCoF) from ±0.48 Hz/s to ±0.21 Hz/s and a 33% reduction in frequency nadir with adaptive inertia and damping. Their approach lacks specificity towards the thermal dynamics of solar thermal plants.
Also, Karthik et al. [9] have studied fault tolerance in photovoltaic systems of permanent magnet synchronous motors under OPAL-RT simulations for faults lasting 0.15–0.3 seconds, but with their focus limited to synchronous generators under thermal cycling. In contrast, our method utilises a d-q axis model to compare four controllers, i.e., baseline PID, Model Reference Adaptive Control (MRAC), H-infinity robust control and a new fault-tolerant active compensation controller (u_ft = K_c * f_est), in real-world fault conditions like partial short circuits, bearing faults and thermal stresses. Compared to Mohammed et al. [10], who compared grid-forming inverter schemes and Jiang et al. [11], who employed comprehensive fault diagnosis, our approach avoids intrusive diagnostics, achieving a low coefficient of variation (CV = 0.335) using the adaptive controller and up to 1.0% RMS error reduction with the fault-tolerant controller compared to PID. The Grid-Forming Inverter Working Group [12] emphasised active fault compensation, which our proposed controller responds to by blending PID action with fault signal estimation to fulfil solar thermal plants' unique operation requirements robustly, optimally and tailored, enhancing system resilience and grid stability without advanced hardware (Table 1).
Table 1: Comparison with Related Work
| Study | Focus | Key Features | Limitations | Proposed Methodology Advantage |
Rajak et al. [8] | Grid stability (AP-VSG) | 56% RoCoF improvement, 33% frequency nadir enhancement | General renewable focus, lacks solar thermal specificity | Tailored for solar thermal dynamics, evaluates 4 controllers |
Karthik et al. [9] | Photovoltaic fault tolerance | Time-dependent fault handling (0.15–0.3s), OPAL-RT simulations | Limited to photovoltaic systems, not synchronous generators | Uses d-q axis modelling, addresses thermal cycling faults |
Mohammed et al. [10] | Grid-forming inverters | Comparative inverter control analysis | Generic renewable focus, not specific to solar thermal | Avoids complex diagnostics, achieves 1.0% RMS error reduction |
Jiang et al. [11] | Industrial fault diagnosis | Advanced fault-tolerant control | Relies on complex diagnostics, not solar thermal-specific | Active fault compensation without intrusive hardware |
Grid-Forming Inverter Group [12] | Bulk power reliability | Specifies active fault compensation needs | Broad operational focus, lacks application-specific solutions | Novel controller integrates PID with fault signal compensation |
This paper proposes a new Fault-Tolerant Control (FTC) strategy for the synchronous machine of large Solar Thermal Power Plants (STPP) and is an important advancement to the current state of the art. The core novelty is the design and comparative assessment of four distinct control strategies (baseline PID, MRAC, H-infinity and an innovative fault-tolerant controller with active fault compensation: ![]() that are customized to account for the distinct thermal dynamics and fault signatures of solar thermal systems. This innovation distinguishes the study from prior works that are generic for renewable systems or predicated on advanced fault diagnosis. This work uses the d-q axis model, which demonstrates up to 1.0 percent of RMS error with the fault-tolerant controller and 0.335 CV with the adaptive controller without the more intrusive hardware to achieve its better robustness. This method is authenticated by multi-criteria metrics (ISE, IAE, RMS error), which is an important gap in application-specific control and has a major contribution to the robustness of the system and grid stability of the solar thermal power plants.
that are customized to account for the distinct thermal dynamics and fault signatures of solar thermal systems. This innovation distinguishes the study from prior works that are generic for renewable systems or predicated on advanced fault diagnosis. This work uses the d-q axis model, which demonstrates up to 1.0 percent of RMS error with the fault-tolerant controller and 0.335 CV with the adaptive controller without the more intrusive hardware to achieve its better robustness. This method is authenticated by multi-criteria metrics (ISE, IAE, RMS error), which is an important gap in application-specific control and has a major contribution to the robustness of the system and grid stability of the solar thermal power plants.
Conflict of Interest
The authors declare no conflict of interest in this research. We received no financial support, grants, or funding from commercial entities that could have influenced the study's design, execution, analysis, or reporting. This research was conducted independently, free from competing interests or relationships that might bias the results or conclusions presented.
Gao, H. et al. “Fault-tolerant control strategy for 12-phase permanent magnet synchronous motor.” Energies, vol. 12, no. 18, September 2019, pp. 3462, https://doi.org/10.3390/en12183462.
Baudart, F. et al. “Control under normal and fault-tolerant operation of multiphase SMPM synchronous machines with mechanically and magnetically decoupled phases.” Proceedings of the International Conference on Power Engineering, Energy and Electrical Drives (POWERENG), April 2009, pp. 1–6, https://doi.org/10.1109/POWERENG.2009.4915200.
Suti, A. et al. “Novel approach to fault-tolerant control of inter-turn short circuits in permanent magnet synchronous motors for UAV propellers.” Aerospace, vol. 9, no. 8, July 2022, pp. 401, https://doi.org/10.3390/aerospace9080401.
Zhao, L. et al. “Fault-tolerant control for reducing harmonic distortion of dual three-phase permanent magnet synchronous motor.” Energies, vol. 15, no. 11, May 2022, pp. 3887, https://doi.org/10.3390/en15113887.
Li, H. et al. “Fault detection of permanent magnet synchronous machines: An overview.” Energies, vol. 18, no. 3, January 2025, pp. 534, https://doi.org/10.3390/en18030534.
Zapar, W.M. et al. “Review of the most recent work in fault-tolerant control of power plants 2018–2022.” Tikrit Journal of Engineering Sciences, vol. 30, no. 2, July 2023, pp. 103–113, https://doi.org/10.25130/tjes.30.2.11.
Khajesalehi, J. and E. Afjei. “Fault-tolerant virtual synchronous generator control of inverters in synchronous generator-based microgrids.” Electric Power Systems Research, vol. 218, May 2023, pp. 109173, https://doi.org/10.1016/j.epsr.2023.109173.
Rajak, M.K. and R. Pudur. “Multiobjective adaptive predictive virtual synchronous generator control strategy for grid stability and renewable integration.” Scientific Reports, vol. 15, 2025, pp. 9241, https://doi.org/10.1038/s41598-025-93721-y.
Karthik, K. and P. Ponnambalam. “Design and implementation of time-based fault tolerance technique for solar pv system reliability improvement in different applications.” Scientific Reports, vol. 15, 2025, pp. 7377, https://doi.org/10.1038/s41598-025-91464-4.
Mohammed, N. et al. “Comparative study of grid-forming inverter control strategies for renewable energy integration.” IEEE Industrial Electronics Magazine, 2025.
Jiang, Y. et al. “Advanced fault diagnosis and fault-tolerant control for complex industrial systems in industry 4.0.” IEEE Transactions on Industrial Electronics, 2025.
Grid-Forming Inverter Working Group. “Grid-Forming Inverter Functional Specifications for Bulk Power System Reliability.” NERC Technical Report, 2025.
Meng, J. et al. “Adaptive sliding mode control of permanent magnet direct-drive wind turbine.” Tehnički Vjesnik, vol. 28, no. 5, 2021, pp. 1617–1625, https://doi.org/10.17559/TV-20210318071726.
Dinesh, A. et al. “Robust H∞ control for line power flow tracking in power systems.” International Journal of Electrical Power & Energy Systems, vol. 156, February 2024, pp. 109704, https://doi.org/10.1016/j.ijepes.2023.109704.
Wu, J. et al. “Fault-tolerant three-vector model-predictive-control-based grid-connected control strategy for offshore wind farms.” Electronics, vol. 13, no. 12, June 2024, pp. 2316, https://doi.org/10.3390/electronics13122316.
Gherghina, I.-S. et al. “Recent advances in fault detection and analysis of synchronous motors: A review.” Machines, vol. 13, no. 9, September 2025, pp. 815, https://doi.org/10.3390/machines13090815
